|
мини 1:32 и меньше
|
|
| RW9UAO | Дата: Вторник, 08.04.2014, 21:06 | Сообщение # 31 |
 Генерал
Группа: Проверенные
Сообщений: 2085
Статус: Offline
| приехал видео-приемник встроенный в монитор.
поездил по хате от первого лица. прикольно =)
|
| |
| |
| RW9UAO | Дата: Среда, 09.04.2014, 21:29 | Сообщение # 32 |
|
Генерал
Группа: Проверенные
Сообщений: 2085
Статус: Offline
| тащщусь от это игрушки =)
|
| |
| |
| RW9UAO | Дата: Четверг, 26.06.2014, 13:34 | Сообщение # 33 |
|
Генерал
Группа: Проверенные
Сообщений: 2085
Статус: Offline
| разбирался на досуге с Спектрумовскими фишками.
R.O.S.S. - стартер. при нажатии на кнопку на пульте включает подкал свечи и крутит электромотор стартера. у меня в приемнике выведено на отдельный канал. нажали кнопку - появилось 3 вольта, отпустили - 0 вольт.
ABS - в моей аппаратуре нету такой функции. я так понял она качает серву тормозную рывками. как оно работает с ESC - не понял.
AVC - система курсовой стабилизации. состоит из двух подфункций - Heading Hold и Thr managment.
там есть один важный момент - после биндинга нужна калибровка - 4 этапа: полный газ, полный тормоз, руль вправо, руль влево. приемник будет подмаргивать при этом. после настройки сабтримов, конечных точек (лимитов) на сервах руля и газа требуется повторный биндинг с калибровкой. это важно. при этом запоминается положение гироскопа (благодаря акселерометру) и задаются лимиты, чтобы при подруливании стабилизатор не выламывал сервы.
сам приемник с системой AVC благодаря 6-ти осевому гироакселерометру можно устанавливать в любой проекции. но параллельно осям.
Heading Hold - работает так же как и гироскоп в вертолете. задается чувствительность, при внешнем воздействии колеса подруливают. как реверсы не настраиваются, как и лимиты они задаются при калибровке после биндинга.
Thr managment - будет слегка отпускать газ при срыве в занос. и слегка подруливать режимом Heading Hold. в пульте задается чувствительность.
у AVC есть еще третий параметр - приоритет. насколько сильно AVC будет вмешиваться в действия пилота.
чувствительность каждой системы можно вывести на кнопку. либо в режиме больше-меньше, либо вкл-выкл.
в 2х канальных системах параметры по умолчанию 50%. в 3х канальных настраивается общая чувствительность, в 4х канальных - настраивается любой параметр. есть исключение - DX2E, она хоть и двух канальная, но имеет отдельную крутилку для чутья AVC.
на приемнике есть отдельный вход для отключения системы стабилизации. она запрещена на соревнованиях.
dsmR похож на dsmX. математику пока не копал.
|
| |
| |
| RW9UAO | Дата: Суббота, 18.10.2014, 17:31 | Сообщение # 34 |
|
Генерал
Группа: Проверенные
Сообщений: 2085
Статус: Offline
| долго думал куда поместить. пусть будет здесь.
коллега у нас один есть, заинтересовался робототехникой. последние полгода занимается шасси. мотор-редукторы у него есть. еще что-то есть. мозги типа ардуины.
и что-то посмотрел я на картинки, покопался в мусорном пакете и задумал не хорошее =)
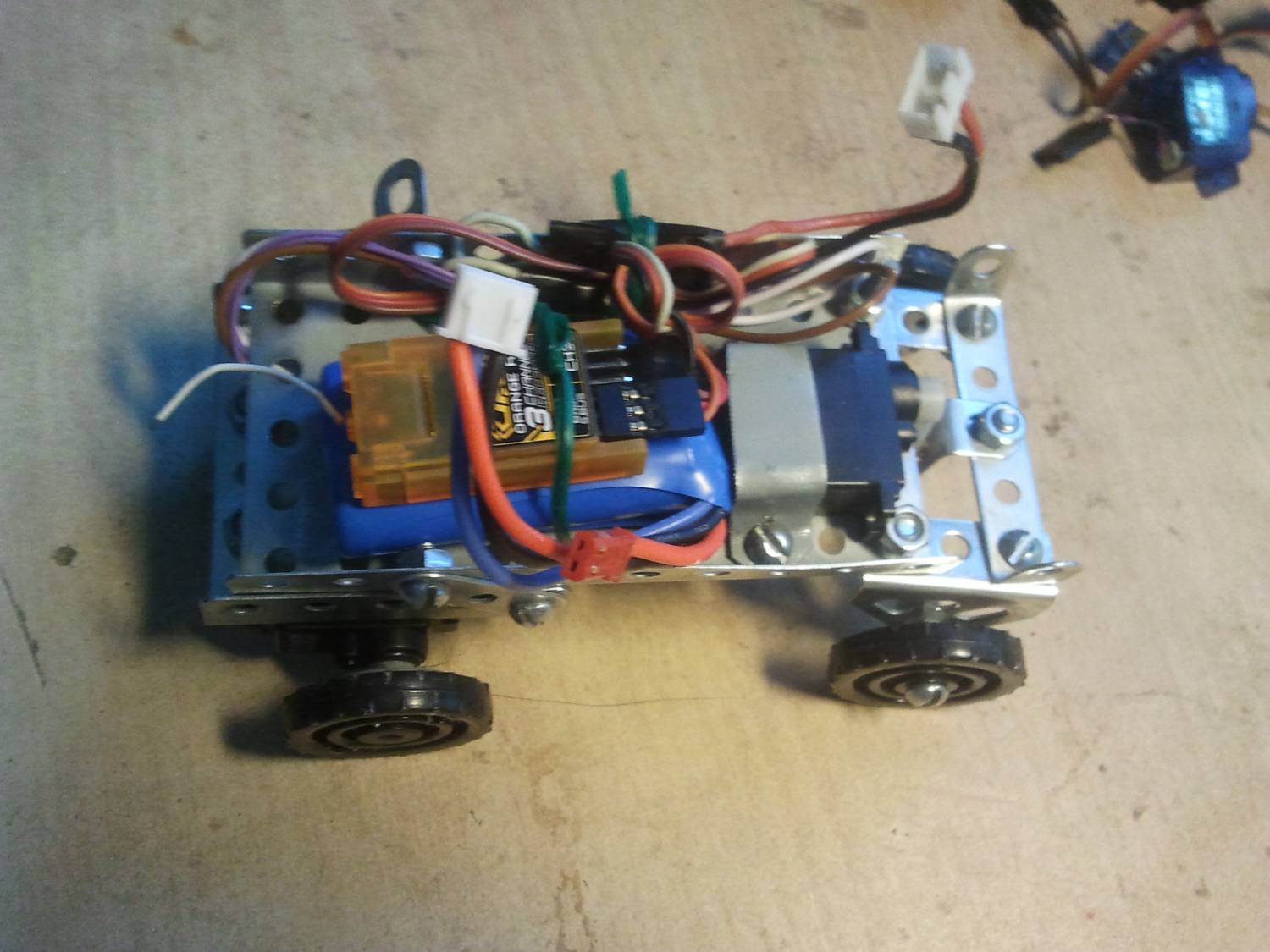
из битых старых вертолетных серв с металл редуктором сделал одну рабочую (летать на ней боязно) и две с без конечным вращением. причем в одной прижился неродной мотор, пиньен перепрессовал.
в качестве регулятора хода хотел использовать родную плату от сервы, но что-то не нашлось исправных, чинить и делать одну из двух-трех лень, потому решил запараллелить моторы и подключить к самодельному ESC для коллекторных моторов. снял с miniQ.
теперь слайды:
Сообщение отредактировал RW9UAO - Суббота, 18.10.2014, 17:33 |
| |
| |
| RW9UAO | Дата: Суббота, 18.10.2014, 17:35 | Сообщение # 35 |
|
Генерал
Группа: Проверенные
Сообщений: 2085
Статус: Offline
| 

|
| |
| |
| RW9UAO | Дата: Суббота, 18.10.2014, 17:47 | Сообщение # 36 |
|
Генерал
Группа: Проверенные
Сообщений: 2085
Статус: Offline
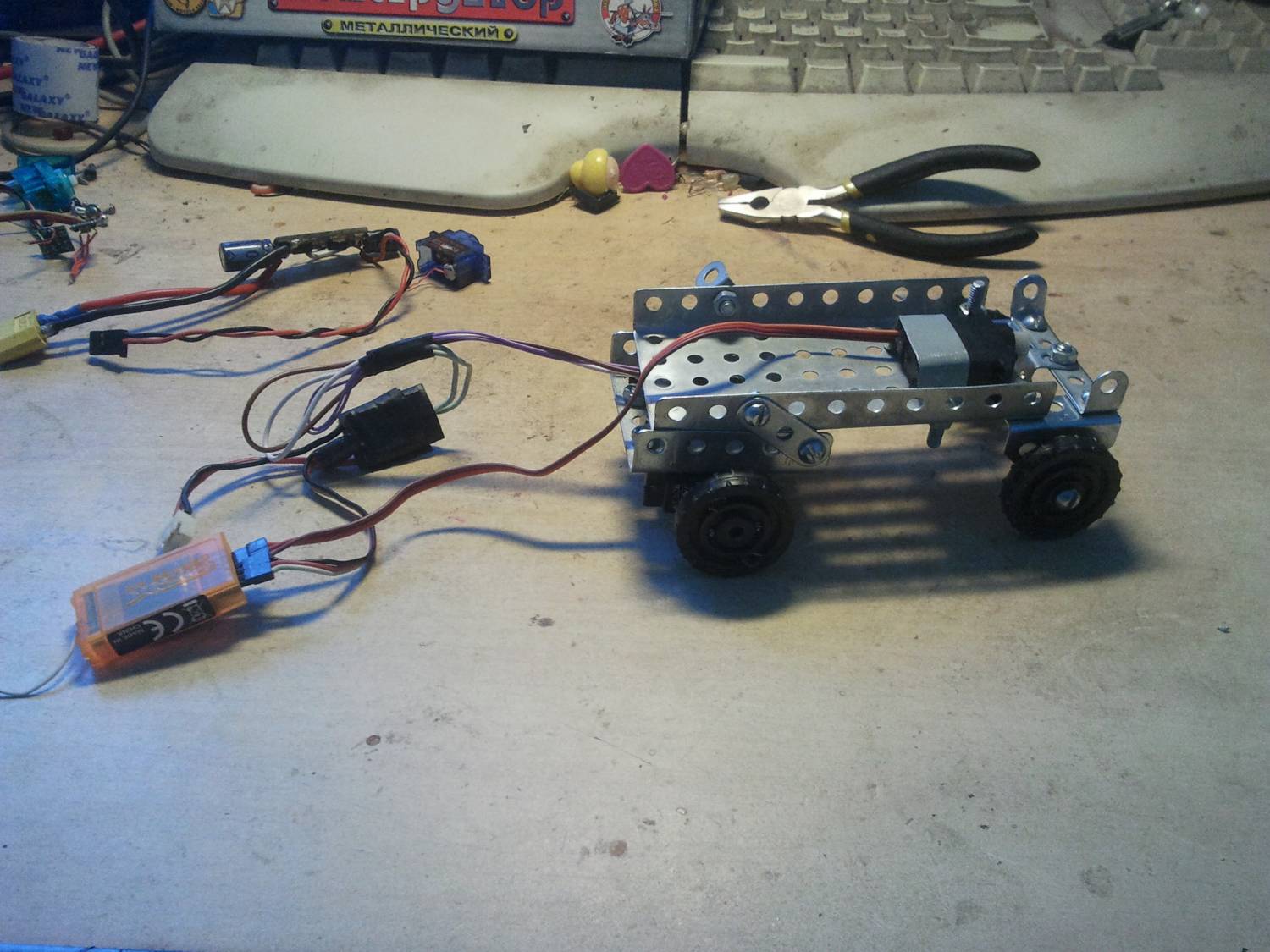
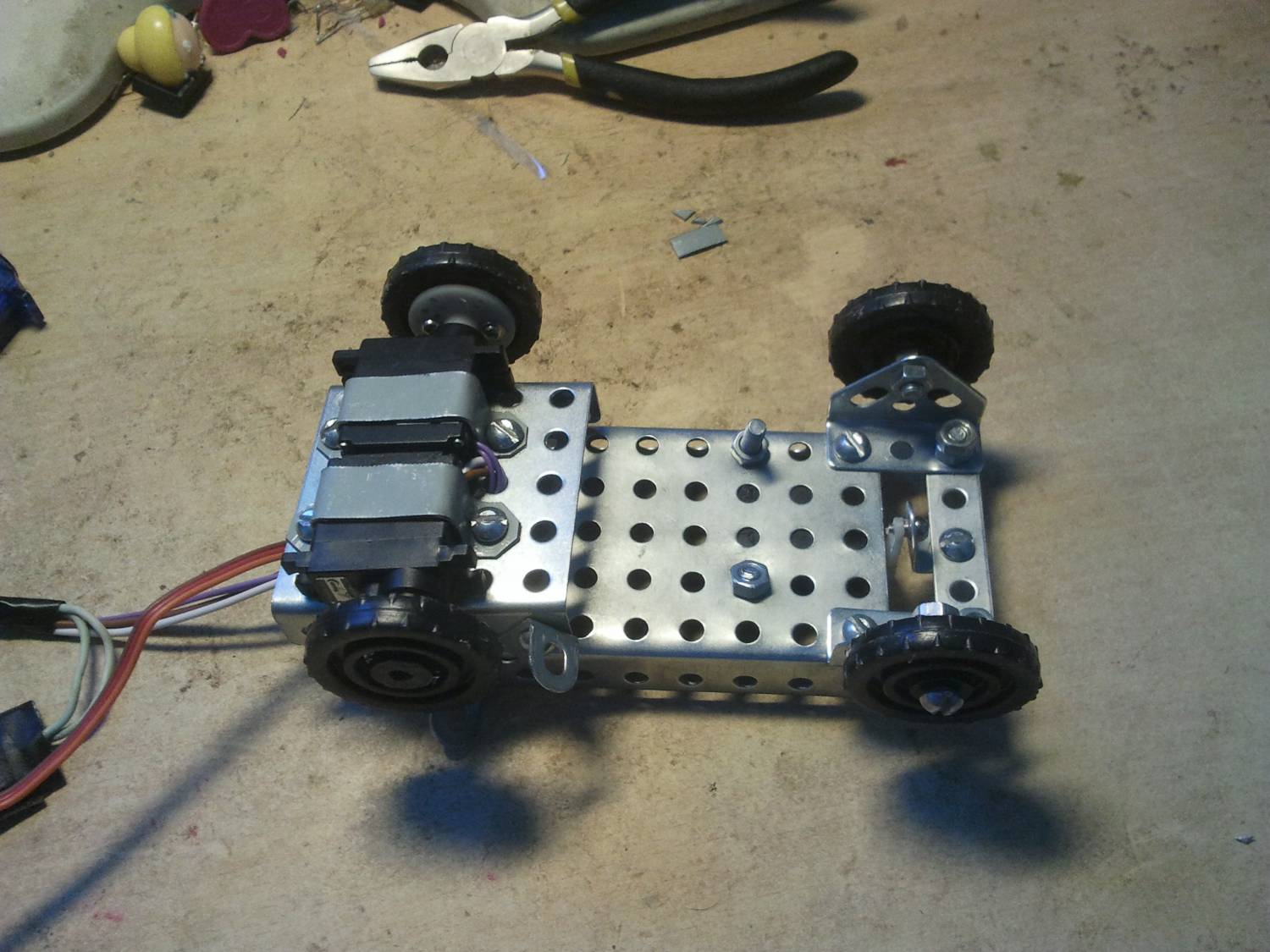
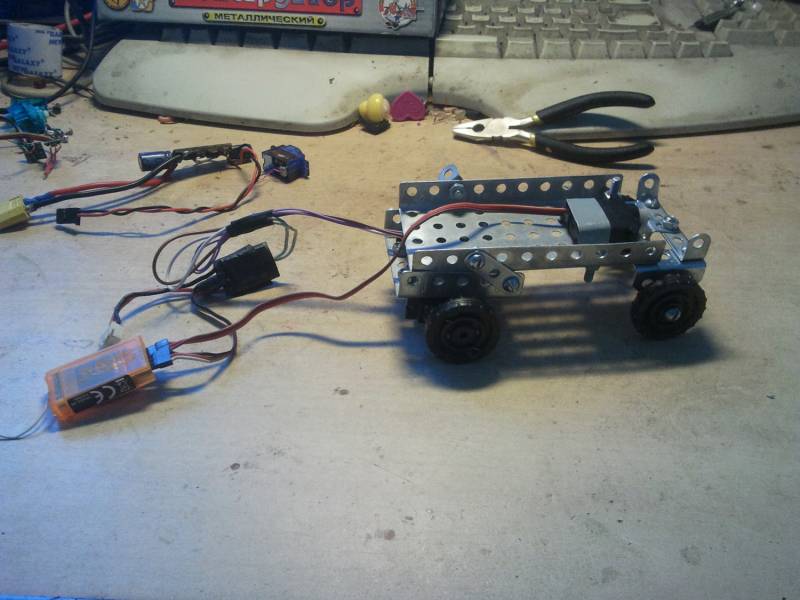
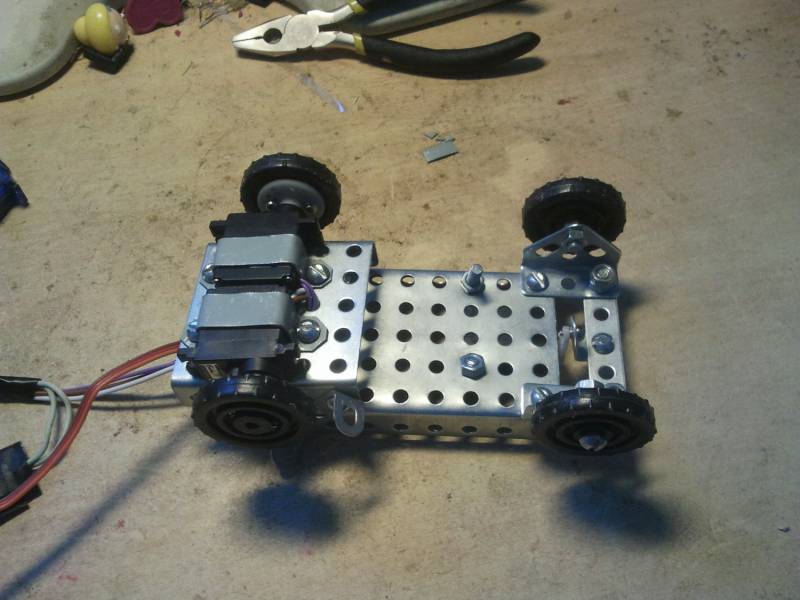
| шасси из Тимохиного металл конструктора. ведущие колеса на мелких саморезах прикручены к качалке сервы.
процент рукожопия при изготовлении скоб крепления серв зашкаливает. жестянка от компутерного БП оказалось слишком толстой и загнуть пассатижами без тисков и молотка ровно не получилось.
передние управляемые колеса соединены рейкой, которую двигает серва. на фотографиях в принципе все видно.
управление - спектрум 3 канала. хотя и двух хватит.
если делать "робота", то вместо ESC будут работать родные платы серв. необходимо только переделать их на вращение выломав стопоры. или подключить к "плате управления моторами для ардуино". но проще использовать их как обычные сервы. ардуино умеет из коробки. в качестве энкодера можно использовать потенциометр сервы - привода колеса, там будет вполне читаемый график в виде пилы. типа как абсолютный энкодер.
рулевую серву используем без переделки =)
бамперы с контактами, УЗ и ИК дальномеры - по желанию.
ребятня в восторге =)
времени ушло на все часа 3. младший механик Тим участвовал в окончательной сборке и тестировании. еще бы ТБ соблюдал. руководителю проекта поставлено на вид.
|
| |
| |
| RW9UAO | Дата: Пятница, 24.10.2014, 15:35 | Сообщение # 37 |
|
Генерал
Группа: Проверенные
Сообщений: 2085
Статус: Offline
| 
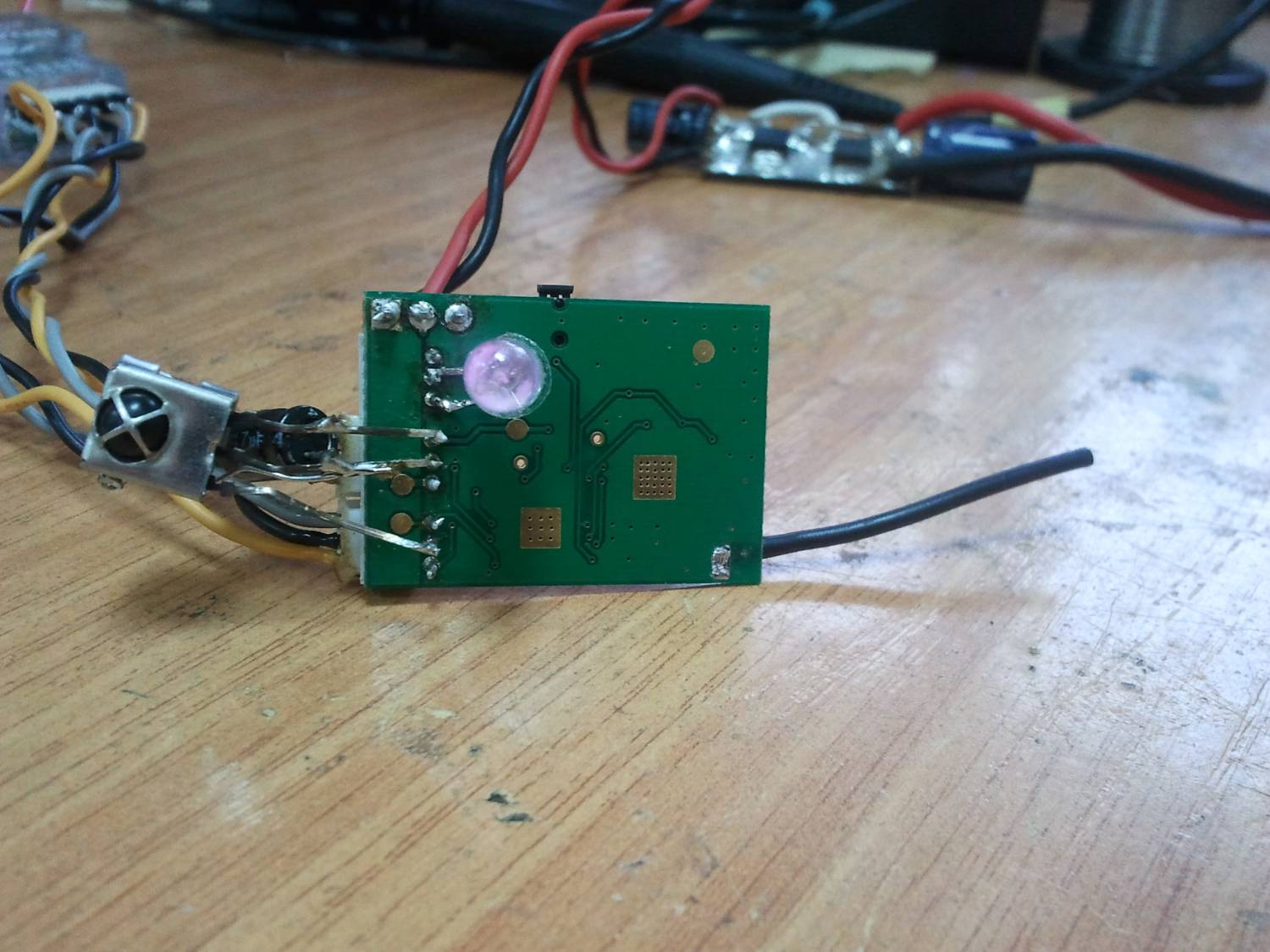
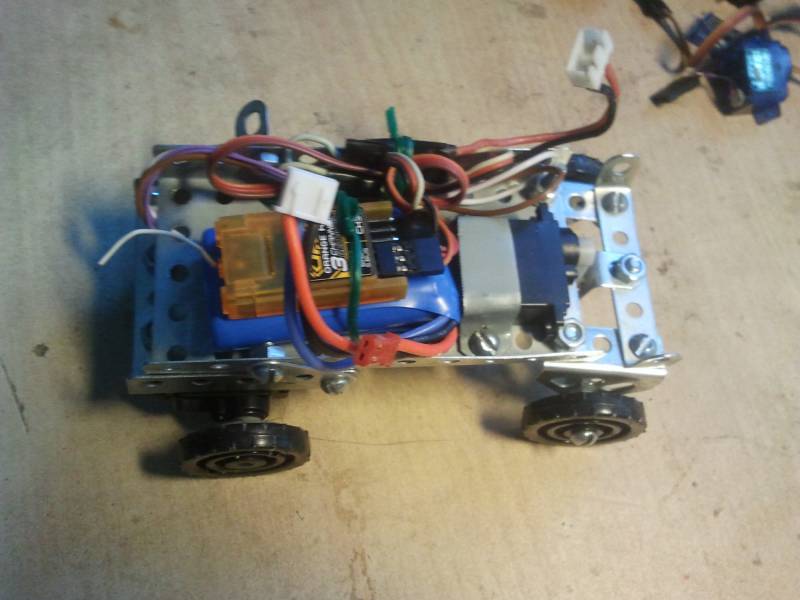
инфракрасный датчик расстояния смотрит фиолетовым глазом на мирЪ.
|
| |
| |
| RW9UAO | Дата: Пятница, 24.10.2014, 15:37 | Сообщение # 38 |
|
Генерал
Группа: Проверенные
Сообщений: 2085
Статус: Offline
| расстояние срабатывания сантиметров 8. четкое отсутствие сигнала сантиметров 20.
|
| |
| |